6月15日,西北工业大学李慧平教授在电气楼005学术报告厅为学校师生作了题为“海洋航行器的经济规划与预测控制”的学术报告。
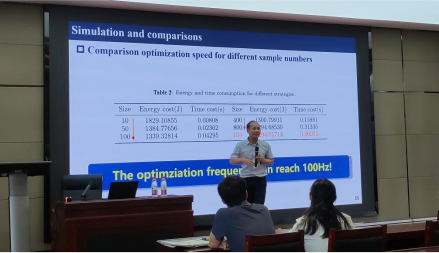
李慧平教授长期从事模型预测控制、无人系统导航、智能决策与控制等领域的教学和科研工作,为国家培养了一批科技人才。主要科研方向为无人系统智能决策与控制、集群协同、模型预测控制与优化、强化学习等。李教授针对无人海洋航行器在复杂环境中能耗、控制性能、安全性等方面系统讲授了基于模型预测控制框架的海洋航行器经济规划和优化控制方法,对比分析了模型预测控制在海洋航行器应用的优越性。李教授解答了部分师生疑问,重点介绍了欠驱动海洋航行器的优化运动控制以及经济预测规划等内容,并展示了相关理论和实验结果。
电气学院相关专业的教师、青年博士、硕士生共同参加了此次学术活动,该报告分享了西北工业大学在模型预测控制与优化研究中的宝贵经验、科研技术与方法,扩大师生视野,师生反响热烈。
[人物简介]
李慧平,1983年出生,分别于2006年、2009年获得西北工业大学本科和硕士学位,于2013年4月获得加拿大维多利亚大学博士学位,2013年5-10月在维多利亚大学工程系从事博士后研究,2013年11月开始在西北工业大学航海学院工作,先后任副教授、教授。现为西北工业大学教授,博士生导师,主要从事模型预测控制理论、水下航行器导航、智能决策与优化控制等方面的研究工作,已推荐多名学生到加拿大、荷兰等海外高校深造,为国家培养了一批科技人才。
多年来,主持省部级以上科研项目多项,在控制领域权威期刊Automatica、IEEE Transactions on Automatic Control发表论文多篇,出版Springer全英文学术专著1部,获陕西省杰青资助,入选陕西省青年科技新星,获陕西省高等学校科学技术一等奖1项,担任《IEEE Trans. Industrial Electronics》《IEEE Trans. Industrial Informatics》,《ASME Journal of Dynamic Systems, Measurements and Control》等国际期刊编委,曾任《IEEE/ASME Transactions on Mechatronics》客座编委以及20余次国内外会议的程序委员会委员,担任14个国际知名期刊和会议的审稿人,与美国、加拿大等国际学者建立了很好的合作关系。